








 AI
AI
AI
AI
AI
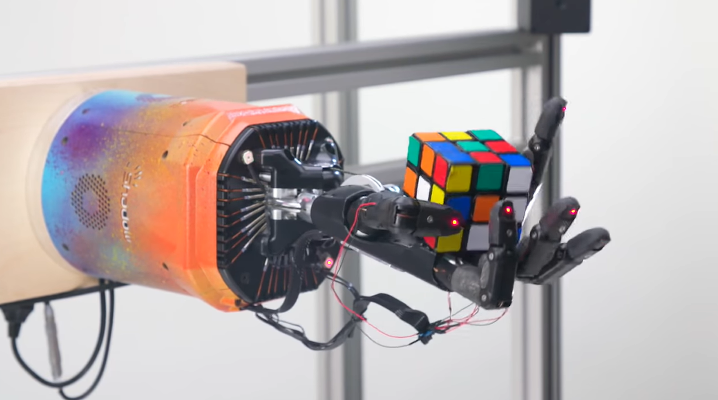
Automated Rubik’s Cube solvers are such a common sight in robotics competitions that Guinness World Records has a dedicated category for them. But OpenAI Inc.’s new entry into the field stands out.
Today, the artificial intelligence research lab unveiled a robotic hand (pictured) that figured out how to unscramble the tiles of a Rubik’s Cube without instructions from a human. It achieved that using a groundbreaking training technique developed by OpenAI that could lend itself to building a new generation of more dexterous and more adaptable autonomous machines.
Most robots in existence today are limited to performing an extremely narrow range of tasks. This is not only, and in certain cases not even mainly, the result of hardware limitations. Rather, it has to do with the fact that training an AI to move and operate in the real-world is fraught with obstacles.
Engineers mostly rely on simulations to build machine learning models for their robots. The basic idea is to create a virtual setting that mimics the environment in which a system will operate, set the AI loose inside and have it learn through trial and error. After a few million attempts, neural networks can master even complex tasks such as walking on two legs.
The problems start when it’s time to install the AI on the host robot. Simulations can’t fully account for the countless variables that exist in the real world, which means machine learning models often end up facing unexpected challenges they weren’t taught to handle.
Enter OpenAI’s new training method. The lab has equipped the AI powering its robot hand to deal with unexpected scenarios by injecting uncertainty into the training simulations. In one learning session, the virtual room’s gravity might be similar to that on the surface of the Earth, while in the next session, it might be stronger or even come from a different angle.
“One of the parameters we randomize is the size of the Rubik’s Cube,” OpenAI’s researchers elaborated in a blog post. “ADR begins with a fixed size of the Rubik’s Cube and gradually increases the randomization range as training progresses. We apply the same technique to all other parameters, such as the mass of the cube, the friction of the robot fingers, and the visual surface materials of the hand.”
The process is carried out by a second machine learning model that makes the simulation progressively harder as the robotic hand’s AI improves. “As the neural network gets better at the task and reaches a performance threshold, the amount of domain randomization is increased automatically,” the researchers explained.
The project has yielded some promising initial results. When the model was unleashed in a real-world environment, the robotic hand it piloted managed to solve a Rubik’s Cube while wearing a rubber glove, with a few fingers bound together and even when researchers tried to knock the cube to the ground using various objects.
OpenAI believes that the training technique may have applications in far more serious projects, too. The method could potentially enable industrial robots, drones and other autonomous machines to dynamically modify their behavior when encountering an unforeseen obstacle or hindrance. This kind of versatility would be an important step towards realizing the holy grail of AI, self-learning artificial general intelligence.
The Rubik’s Cube solver is one of the first major projects OpenAI has detailed since inking a $1 billion partnership with Microsoft Corp. in July. Under the deal, Microsoft will provide the lab with capital and cloud infrastructure to support research in exchange for intellectual property access.
Support our mission to keep content open and free by engaging with theCUBE community. Join theCUBE’s Alumni Trust Network, where technology leaders connect, share intelligence and create opportunities.
Founded by tech visionaries John Furrier and Dave Vellante, SiliconANGLE Media has built a dynamic ecosystem of industry-leading digital media brands that reach 15+ million elite tech professionals. Our new proprietary theCUBE AI Video Cloud is breaking ground in audience interaction, leveraging theCUBEai.com neural network to help technology companies make data-driven decisions and stay at the forefront of industry conversations.





